Meadow.Foundation.Sensors.Atmospheric.Ccs811
| Ccs811 | |
|---|---|
| Status | |
| Source code | GitHub |
| Datasheet(s) | GitHub |
| NuGet package |  |
Code Example
Ccs811 sensor;
public override Task Initialize()
{
Resolver.Log.Info("Initializing...");
var i2cBus = Device.CreateI2cBus(Meadow.Hardware.I2cBusSpeed.Fast);
sensor = new Ccs811(i2cBus);
var consumer = Ccs811.CreateObserver(
handler: result =>
{
Resolver.Log.Info($"Observer triggered:");
Resolver.Log.Info($" new CO2: {result.New.Co2?.PartsPerMillion:N1}ppm, old: {result.Old?.Co2?.PartsPerMillion:N1}ppm.");
Resolver.Log.Info($" new VOC: {result.New.Voc?.PartsPerBillion:N1}ppb, old: {result.Old?.Voc?.PartsPerBillion:N1}ppb.");
},
filter: result =>
{
if (result.Old is { } old)
{
return (
(result.New.Co2.Value - old.Co2.Value).Abs().PartsPerMillion > 1000 // 1000ppm
&&
(result.New.Voc.Value - old.Voc.Value).Abs().PartsPerBillion > 100 // 100ppb
);
}
return false;
}
);
sensor.Subscribe(consumer);
sensor.Updated += (sender, result) =>
{
Resolver.Log.Info($"CO2: {result.New.Co2.Value.PartsPerMillion:n1}ppm, VOC: {result.New.Voc.Value.PartsPerBillion:n1}ppb");
};
return Task.CompletedTask;
}
public override async Task Run()
{
var result = await sensor.Read();
Resolver.Log.Info("Initial Readings:");
Resolver.Log.Info($" CO2: {result.Co2.Value.PartsPerMillion:n1}ppm");
Resolver.Log.Info($" VOC: {result.Voc.Value.PartsPerBillion:n1}ppb");
sensor.StartUpdating(TimeSpan.FromSeconds(1));
}
Sample project(s) available on GitHub
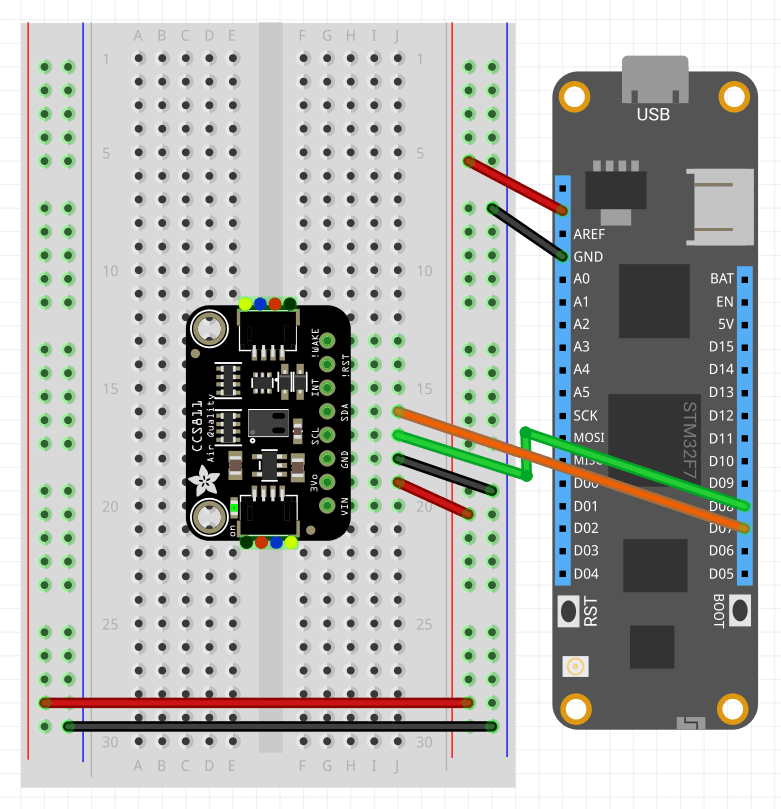
Wiring Example
To wire a Ccs811 to your Meadow board, connect the following:
| Ccs811 | Meadow Pin |
|---|---|
| GND | GND |
| VCC | 3V3 |
| SCL | D08 |
| SDA | D07 |
It should look like the following diagram: